Wie baue ich ein neues Feature ein?
- Grundstruktur anlegen
- Konfiguration erstellen
- Code schreiben
Grundstruktur
Was benötige ich alles für meinen Treiber?

- Verzeichnis:
fs/ext4 - Beschreibung, was gebaut werden soll:
fs/ext4/Kconfig - Beschreibung, was alles dazugehört:
fs/ext4/Makefile - Natürlich den Quellcode selbst:
fs/ext4/code.c
Wie baue ich ein neues Feature ein?
- Grundstruktur anlegen ✅
- Konfiguration erstellen
- Code schreiben
Konfiguration
Kconfig (Wdh.)
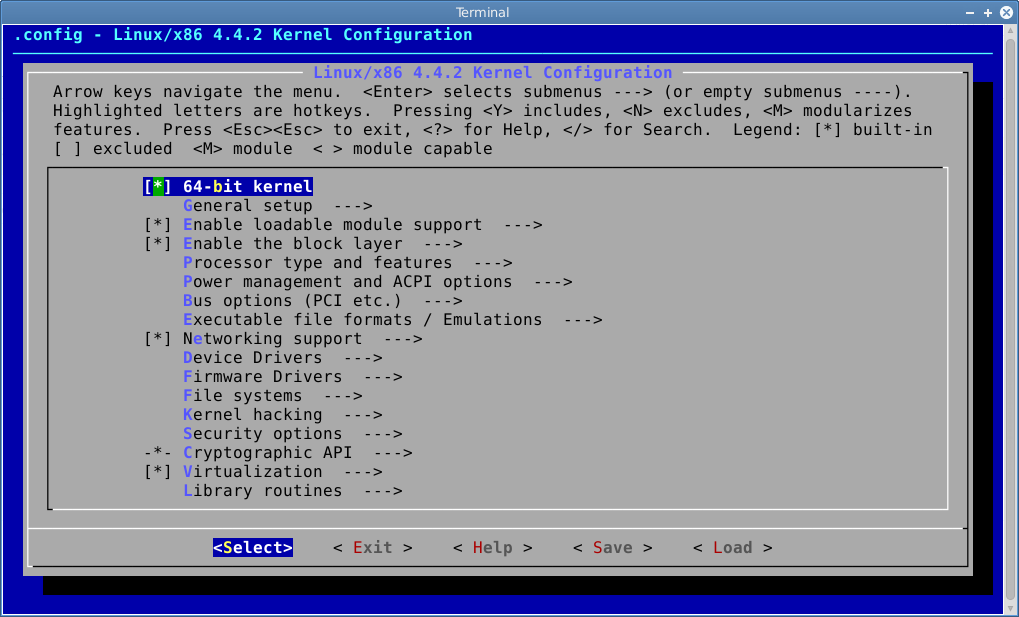
- Konfigurationssprache des Linux-Kerns
- Verwaltet Konfigurationsoptionen zur Übersetzungszeit
- Berücksichtigt Abhängigkeiten und setzt diese durch
- Bedeutung der Symbole
- < > keine Abhängigkeiten
- [ ] kann einkompiliert (y) werden oder nicht (n)
- { } als Modul (m) oder einkompiliert (y) benötigt
- - - einkompiliert (y) benötigt
Kconfig unter der Haube
(Aus fs/ext4/Kconfig)
configleitet eine Konfigurationsoption ein, dahinter der Bezeichner der Optiontristatebezeichnet den Typ der Option (tristate,bool,int,string, …)selectwählt zusätzliche Optionen, wenn diese Option aktiviert wirdhelpist selbst erklärend- Fehlt:
depends→ Beschreibt Abhängigkeiten zu anderen Optionen - Konfigurationsoptionen stehen sowohl im Quellcode als auch im Makefile mit dem Prefix
CONFIG_zur Verfügung
Von der Konfiguration zum Quellcode – Grundlagen
- Makefile-Variablen legen Art der Übersetzung fest (siehe 3. in Dokumentation)
obj-y += foo.o: Übersetze Dateifoo.cimmerobj-m += foo.o: Übersetze Dateifoo.c, wenn die Modulunterstützung aktiv ist
- Konfigurierbare Übersetzung
obj-$(CONFIG_FOO) += foo.o- Übbersetze
foo.c, wenn KonfigurationsoptionCONFIG_FOOentweder y oder m ist
- Binde Unterverzeichnisse ein
(Aus fs/Makefile)
Von der Konfiguration zum Quellcode – Makefile
# SPDX-License-Identifier: GPL-2.0
#
# Makefile for the linux ext4-filesystem routines.
#
obj-$(CONFIG_EXT4_FS) += ext4.o
ext4-y := balloc.o bitmap.o block_validity.o dir.o ext4_jbd2.o extents.o \
extents_status.o file.o fsmap.o fsync.o hash.o ialloc.o \
indirect.o inline.o inode.o ioctl.o mballoc.o migrate.o \
mmp.o move_extent.o namei.o page-io.o readpage.o resize.o \
super.o symlink.o sysfs.o xattr.o xattr_hurd.o xattr_trusted.o \
xattr_user.o fast_commit.o orphan.o
ext4-$(CONFIG_EXT4_FS_POSIX_ACL) += acl.o
# [....]
obj-$(CONFIG_EXT4_KUNIT_TESTS) += ext4-inode-test.o
# [....](Aus fs/ext4/Makefile)
- Modul
ext4.obesteht aus mehreren Quellcodedateien - Umweg über separate Variable gemäßg Modulname:
ext4-y := - Syntax ist genauso wie bereits erwähnt
Wie baue ich ein neues Feature ein?
- Grundstruktur anlegen ✅
- Konfiguration erstellen ✅
- Code schreiben
Gerätetreiber
Von Systemaufruf zum Treiber
(gdb) bt
#0 universe_read (file=0xffff88800453b700,
buf=0x7f9b78c4a000 <error: Cannot access memory at address 0x7f9b78c4a000>,
count=42, ppos=0xffffc90000507ef0) at drivers/sst/sst_chrdev.c:25
#1 0xffffffff812a5579 in vfs_read (file=file@entry=0xffff88800453b700,
buf=buf@entry=0x7f9b78c4a000 <error: Cannot access memory at address 0x7f9b78c4a000>,
count=count@entry=131072, pos=pos@entry=0xffffc90000507ef0) at fs/read_write.c:468
#2 0xffffffff812a60e3 in ksys_read (fd=<optimized out>,
buf=0x7f9b78c4a000 <error: Cannot access memory at address 0x7f9b78c4a000>,
count=131072) at fs/read_write.c:613
#3 0xffffffff812a6179 in __do_sys_read (count=<optimized out>, buf=<optimized out>,
fd=<optimized out>) at fs/read_write.c:623
#4 __se_sys_read (count=<optimized out>, buf=<optimized out>, fd=<optimized out>)
at fs/read_write.c:621
#5 __x64_sys_read (regs=<optimized out>) at fs/read_write.c:621
#6 0xffffffff81b1b055 in do_syscall_x64 (nr=<optimized out>, regs=0xffffc90000507f58)
at arch/x86/entry/common.c:50
#7 do_syscall_64 (regs=0xffffc90000507f58, nr=<optimized out>)
at arch/x86/entry/common.c:80
#8 0xffffffff81c0006a in entry_SYSCALL_64 () at arch/x86/entry/entry_64.S:120Zustellen von Systemaufrufen zu Treibern
ssize_t vfs_read(struct file *file, char __user *buf, size_t count, loff_t *pos)
{
ssize_t ret;
if (!(file->f_mode & FMODE_READ))
return -EBADF;
if (!(file->f_mode & FMODE_CAN_READ))
return -EINVAL;
if (unlikely(!access_ok(buf, count)))
return -EFAULT;
// [...]
if (file->f_op->read)
ret = file->f_op->read(file, buf, count, pos);
else if (file->f_op->read_iter)
ret = new_sync_read(file, buf, count, pos);
else
ret = -EINVAL;
if (ret > 0) {
fsnotify_access(file);
add_rchar(current, ret);
}
inc_syscr(current);
return ret;
}(Aus fs/read_write.c:468)
Polymorphie in C 😖
UNIX-Paradigma- „Alles ist eine Datei”
- Dateioperationen definieren Interaktionen: open, read, write, lseek, …, close
- Schnittstellendefinition über Funktionszeiger
- Definition der Schnittstelle in
struct file_operations:
struct file_operations {
struct module *owner;
loff_t (*llseek) (struct file *, loff_t, int);
ssize_t (*read) (struct file *, char __user *, size_t, loff_t *);
ssize_t (*write) (struct file *, const char __user *, size_t, loff_t *);
ssize_t (*read_iter) (struct kiocb *, struct iov_iter *);
// [...]
} __randomize_layout;(Aus include/linux/fs.h:2109)
Was bedeuten die Parameter beim read-Systemaufruf?

Datenstruktur hinter Dateideskriptor – struct file
struct file {
// [...]
struct path f_path;
struct inode *f_inode; /* cached value */
const struct file_operations *f_op;
// [...]
unsigned int f_flags;
fmode_t f_mode;
struct mutex f_pos_lock;
loff_t f_pos;
// [...]
/* needed for tty driver, and maybe others */
void *private_data;
// [...]
} __randomize_layout
__attribute__((aligned(4))); /* lest something weird decides that 2 is OK */(Aus include/linux/fs.h:940)
- Repräsentiert im Kern eine geöffnete Datei
- Weitere Informationen in „Linux Device Driver” (Buchseite 66 [1])
Die Programmierschnittstelle (API)
Ausgaben
- Grundsätzliches Vorgehen ist wie bei
printf()(Formatstring, Argumente, …) - Pendant im Kernel heißt
printk(), Semantik ist aber gleich!
- Makros für das passende Log-Level:
pr_err,pr_info,pr_debug, … printk_ratelimited()🤔- Definition und (etwas) Dokumentation in include/linux/printk.h:434
Dynamische Speicherverwaltung (im Linux-Kern)
vmalloc/vfree- Allokation von virtuell adjazentem Speicher
- Bekommt Größe übergeben
kmalloc/kfree- Allokation von physikalisch adjazentem Speicher
- Bekommt Größe und Flags übergeben – siehe Dokumentation
kmalloc-FlagsGFP_KERNEL: „Allocate normal kernel ram. May sleep.”GFP_NOWAIT: „Allocation will not sleep.”GFP_ATOMIC: „Allocation will not sleep. May use emergency pools.”
Kernel-Threads
- Kernel-Threads sind „standard processes that exist solely in kernel-space” (Buchseite 35, [2])
- Verhalten sich wie normale Prozesse: unterliegen Ablaufplanung und Präemption
- Wichtiger Unterschied: verfügen über keinen keinen eigenen Adressraum, laufen im Adressraum des Kerns
- Erzeugung läuft intern auch über Systemaufruf
clone(), wie beim Systemaufruffork() - Bei Erzeugung nicht lauffähig; müssen explizit gestartet werden
Kernel-Threads – API
Thread erstellen:
struct *task_struct kthread_create(int (*threadfn)(void *data), void *data, const char namefmt[],...)Erstellten Thread aufwecken:
int wake_up_process(struct task_struct *tsk)Warten bis der Thread sich beendet:
int kthread_stop(struct task_struct *tsk)Soll der Thread anhalten?
bool kthread_should_stop(void)
Weitere Funktionen und „Dokumentation” finden sich in include/linux/kthread.h
Kernel-Threads – Beispiel
#include <linux/kthread.h>
char *text = "Hello from the other side!";
struct task_struct *faden;
static int work_fn(void *arg) {
char *text = (char*)arg;
while (!kthread_should_stop()) {
printk("Working: %s\n", text);
ssleep(1);
}
return 0;
}
static init __init module_init(void) {
faden = kthread_create(work_fn, (void*)text, "ein-name");
if (IS_ERR(faden)) {
pr_err("Error\n");
}
return 0;
wake_up_process(faden);
return 0;
}
// kthread_stop(faden);Synchronisation
- Ganze Code-Abschnitte
- (RW-)Spinlocks
- Mutex
- (RW-)Semaphore
- Sequential Locks
- Abschalten von Präemption/Unterbrechungen
- Auf Instruktionsebene
- Atomare Operationen
- Barrieren
- Sonstige
- Completion Variables
(Siehe Kapitel 10 in „Linux Kernel Development” [2])
Synchronisation – API
- Spinlocks
spin_lock/spin_unlock- Abschalten der Softirqs bzw. Unterbrechungen mit Suffix:
_bh,_irq,_irqsave
- Mutex/Semaphore
down/up(Besser:down_interruptible)mutex_lock/mutex_unlock
- Vergleich zwischen Spinlocks und Mutex/Semaphore in Kap. 10, Seite 197 [2]
- Verwendung eines Semaphores siehe
drivers/sst/sst_common.cin Zeile 146 bzw. 171)
Kernel Library
- Kern-weite Bibliothek
- Circular Buffers (oder Ihr nehmt den
BoundedBufferaus unserem Treiber. Fragt gerne nach.) - Zufallszahlen:
get_random_uX()– siehe include/linux/random.h - Operationen für Zeichenketten:
strcpy(),strcmp(), … (Dokumentation) - Einlesen von Zahlen:
kstrtol()(Dokumentation) odersscanf()(Dokumentation) - Verkettete Listen (Buchseite 85 ff. [2] und im Code)
- Circular Buffers (oder Ihr nehmt den
Bounded Buffer
Fehlerbehandlungen
- Beachtet immer den Rückgabewert einer Funktion
- Behandelt immer den Fehlerfall
- Macht bereits abgeschlossenen Teilschritte immer rückgängig
- Fehler sind im Kern sind besonders fatal
→ Im Zweifel eine Ausgabe und einen Fehlercode zurückgegeben
Wie baue ich ein neues Feature ein?
- Grundstruktur anlegen ✅
- Konfiguration erstellen ✅
- Code schreiben ✅
Dokumentation
Dokumentation
- Quellcode und Kommentare, sofern vorhanden. 😱 😍 🥴 🤮
- Kern-Dokumentation
- Bücher
- „Linux Kernel Development 3rd Edition” [2]
- „Understanding The Linux Kernel” [3]
- „Linux Device Drivers 3rd Edition” [1]
- Die Bücher habe ich alle im Büro liegen. 😎
Referenzen
[1]
J. Corbet, A. Rubini, und G. Kroah-Hartman, Linux Device Drivers, 3rd Edition. O’Reilly Media, Inc., 2005.
[2]
R. Love, Linux Kernel Development, 3rd Aufl. Addison-Wesley, 2010.
[3]
D. P. Bovet und M. Cesati, Understanding The Linux Kernel, 3rd Aufl. O’Reilly Media Inc., 2005.